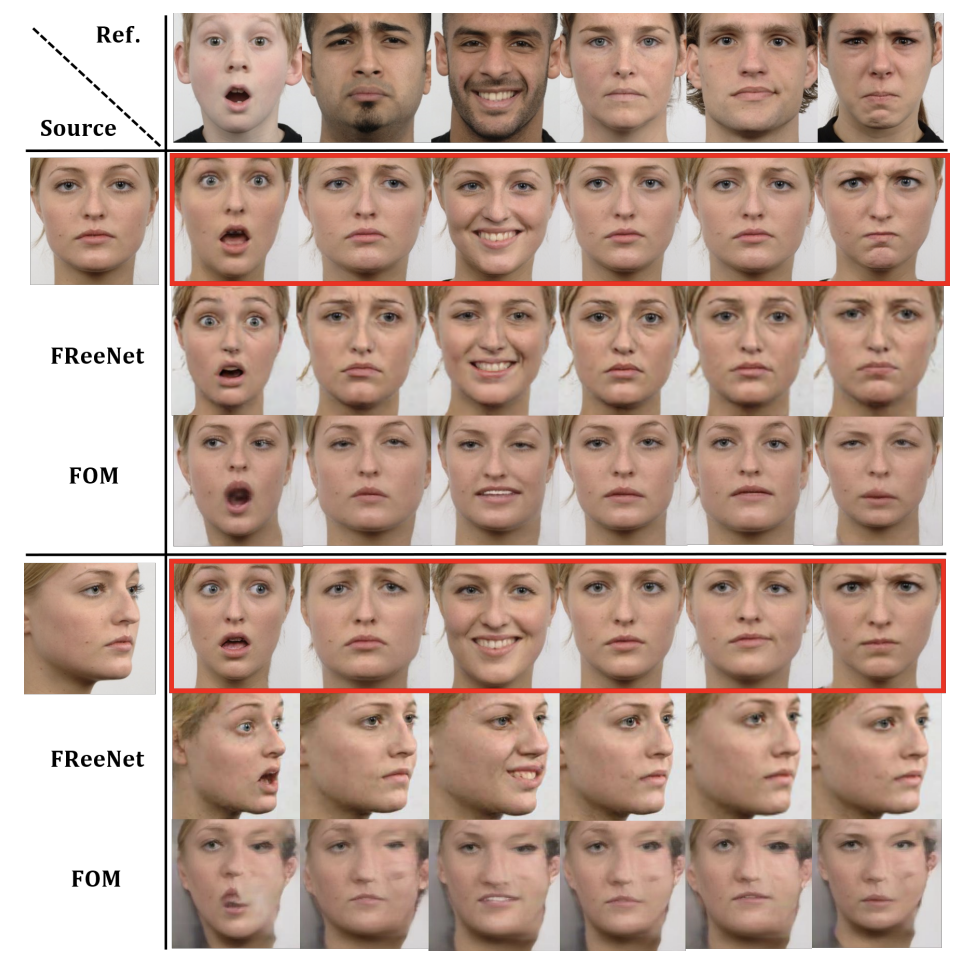
Introduction Face reenactment (FR) is a conditional face generation technique aiming to accomplish two objectives given a pair of face images (source and reference faces): 1) Translate an expression and pose of a reference face (=face shape) into a target face. 2) Transfer an identity of a source face into a target face. The goal…